建图航拍——正射操作五步曲
分类:正射图 发布时间:2024-01-14 浏览量:7928
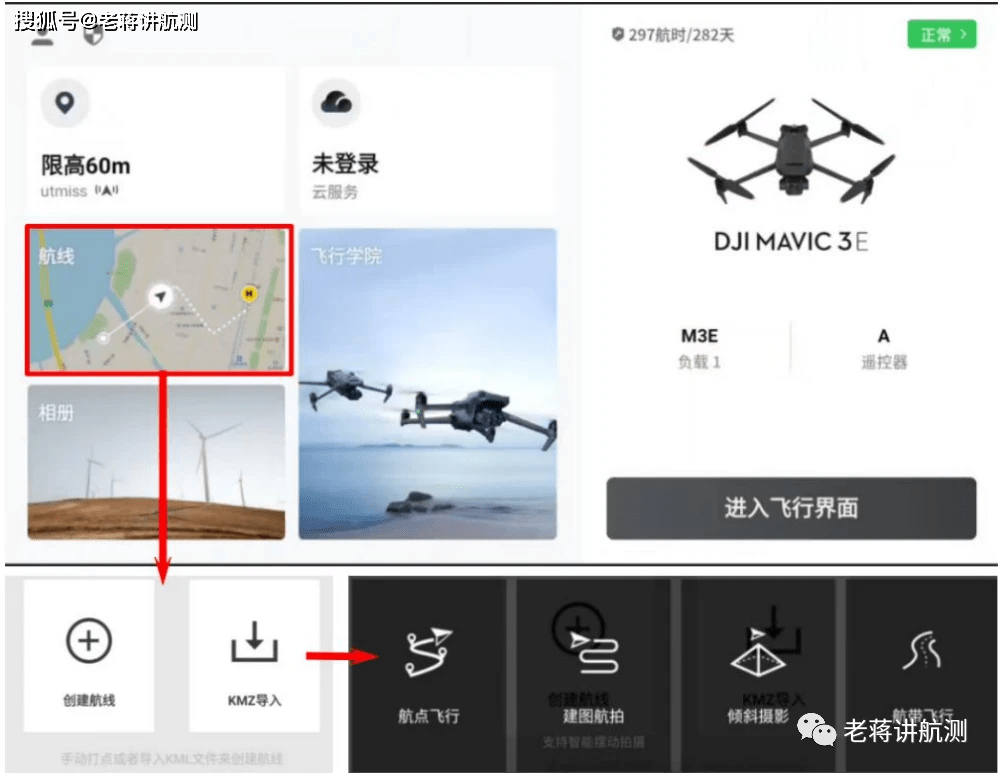
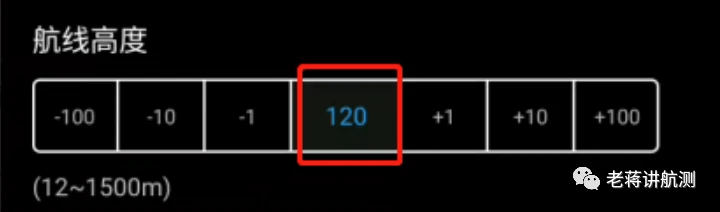
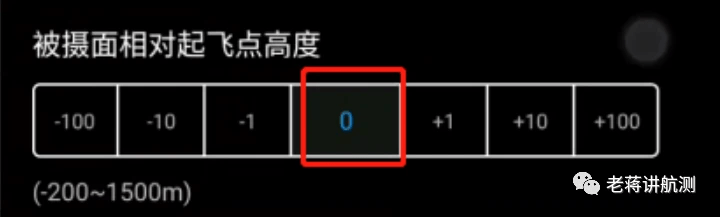
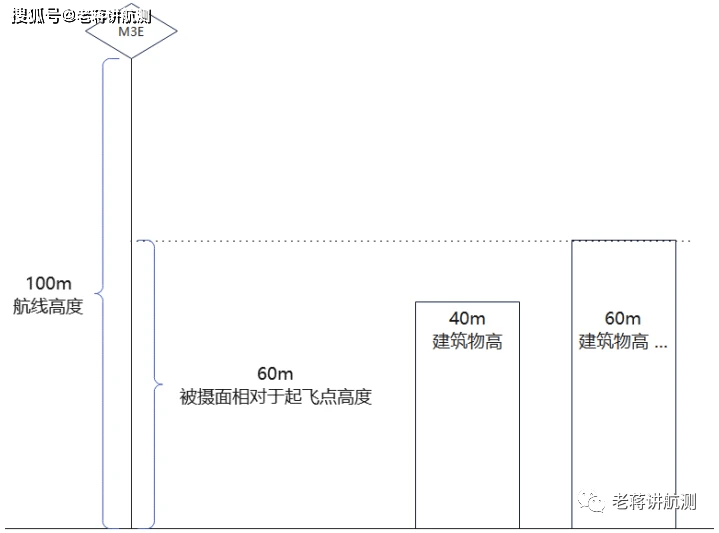
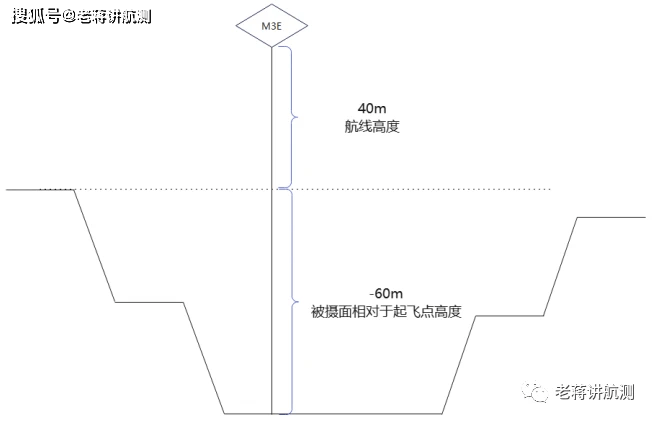
M3E可支持建图航拍、倾斜摄影、航带飞行和航点飞行。在建图航拍中,还可开启仿地飞行和智能摆拍任务。 一、功能应用场景 建图航拍功能是最为常用的航测功能,可以面对绝大部分测绘应用场景。该功能通过定义一个测区范围,Pilot2APP会根据所需要的分辨率和重叠度,自动规划飞行航线,并让M3E无人机执行。 二、航线规划 1)进入DJIPilotApp航线飞行界面>创建航线或KML导入,选择创建建图航拍任务。在地图界面通过点击和拖动调整测区范围,点击航线中间的“+”号,可添加测区边界拐点。 注意: ⚫在该界面,可查看遥控器、无人机、返航点位置,默认为执行任务前以无人机位置设置为返航点位置。 ⚫建议将地图模式切换为卫星图,以更好的查看地物,帮助安全合理的规划航线。 ⚫在规划航线过程中,应时刻注意航线信息预览信息。 2)为该航线命名,后续执行该航线会以该文件名为前缀,后跟任务执行时间日期。 3)选择相机:选择“DJIMavic3行业版”-“广角”。 4)设置“航线高度”:M3E广角相机的分辨率与航线高度关系为GSD=H/37,即37米时的地面分辨率为1cm,根据精度要求合理设置飞行高度。 5)被摄面相对起飞点高度可以调整航线重叠度,适用于高程呈现明显“阶梯状”的测区场景,如:在一片高层建筑群场景下,更高
的楼60米,则可以设定航线高度为100米,被摄面相对起飞点高度为60米,则航线重叠度会按40米航高进行执行,保障了更高
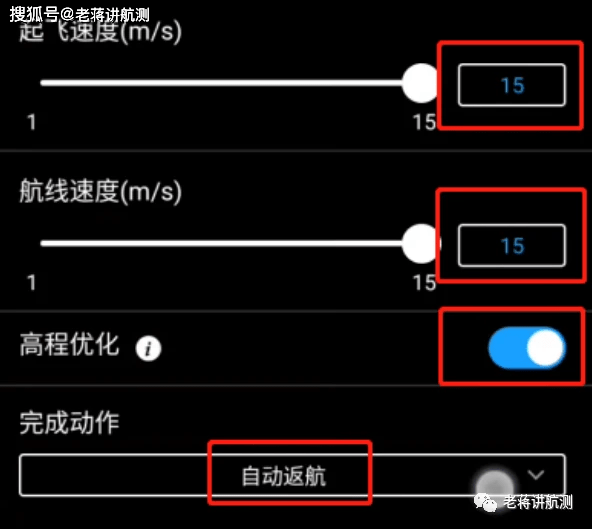
处的重叠度。 同理,如果是阶梯状的露天矿,坑中最深距离坑顶100米,在矿坑顶起飞,希望对坑底进行建图航拍,则可设计航线高度40米,被摄面相对于起飞点高度-60米,则M3E将会以100米高度进行重叠度的执行。 6)设置起飞速度与航线速度为15m/s,开启“高程优化”选项,完成动作设置为“自动返航”。 7)
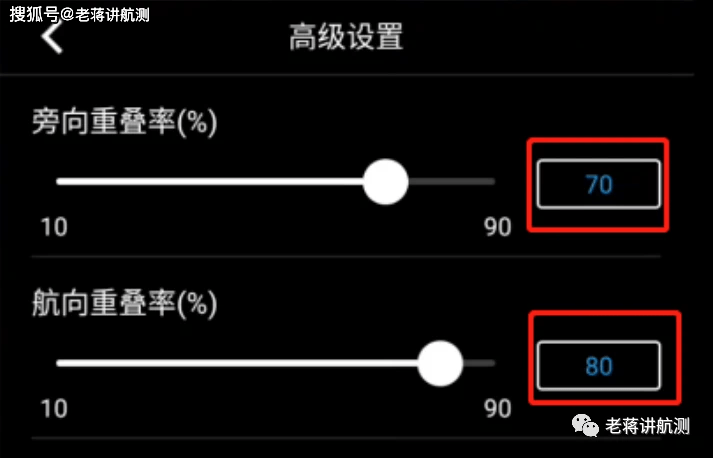
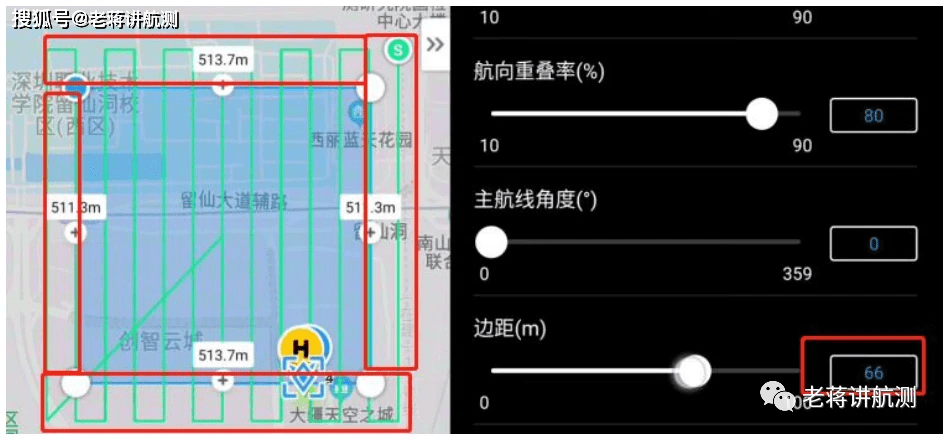
设置中,设置旁向重叠率为60-70%、航向重叠率80%。 注意: ⚫旁向重叠度会极大的影响作业效率和最终成果精度,70%是默认值,适用于绝大部分场景,效率与精度兼顾。 ⚫如果测区较为平坦(更大
落差小于航高10%视为平坦,如100米航高,测区更大
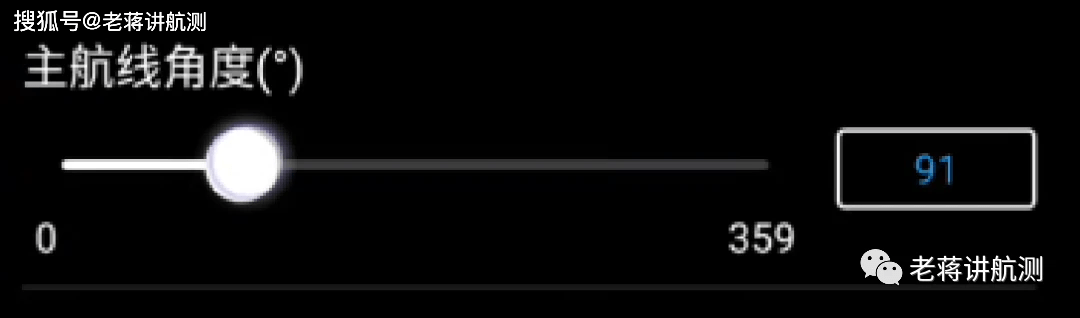
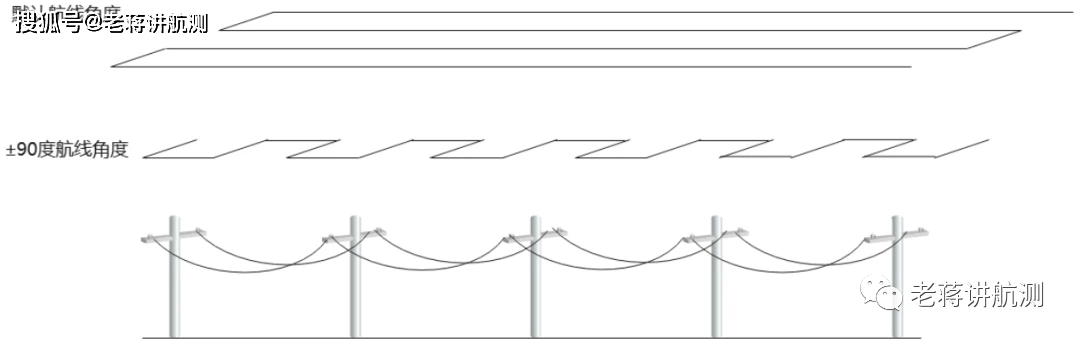
落差不大于10米),则可以将旁向重叠度降低到60%,更低则不建议,低于60%不能保证精度,低于50%不能保证正射图的完整。 8)主航线角度设置:默认主航线角度为效率更优
的设计方法,会自动实现最短路径执行完毕测区作业。 但是在个别场景下,需要调整航线角度,来实现更好的成果质量,如电力线建模:采用±90度的主航线角度,则可以生成更好的电力线点云。 9)设置边距:边距默认为0米,更大
可设置为100米。在一些对成果质量要求较高的项目中,要求了必须在测区基础上,外扩一定范围,以保证测区内部的精度和数据质量,此时可以根据要求设置边距范围。 10)拍照模式:设置为“等时间间隔拍照”。M3E会自动根据分辨率、飞行速度、航向重叠度这三个参数自动调整拍照间隔,其最短拍照间隔为0.7s。大约在50米航线高度,15m/s飞行速度、80%航向重叠度设计时,会达到这个极限,如果此时调高航向重叠度,或降低航线高度,都会自动降低飞行速度。 注意: 不建议设置为“等间距拍照”,因为在个别情况下,如顺风飞行时,飞行速度过快,有漏拍风险。 11)点击保存任务,点击上传航线并执行飞行任务。