



一文看懂倾斜摄影技术原理、精度提升、成果检查
分类:服务范围 发布时间:2024-01-15 浏览量:6165
近年来倾斜摄影技术已广泛应用于三维数据采集设备当中,并且由于设备的简便易用性和航测效率的高效性,让越来越多的从业者参与到航测项目中来,大家在外业工作中积累了一定的实操经验,但却也忽视了对基本原理知识的梳理,赛尔无人机将通过以下内容为大家分享基本倾斜摄影原理和在技术应用上应该注意的知识,希望对大家航测工作有所帮助。
01 倾斜摄影技术
何为倾斜摄影
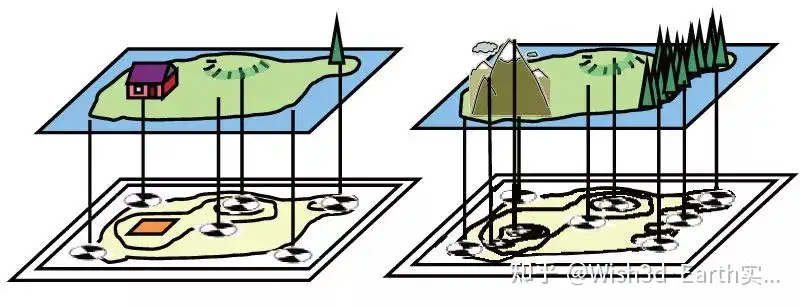
倾斜摄影技术是通过在飞行平台上搭载多台传感器,同时从一个垂直、四个侧视等不同角度采集影像。它比传统的摄影测量多了四个倾斜拍摄角度,从而能够获取到更加丰富的侧面纹理等信息。

五镜头相机相对位置
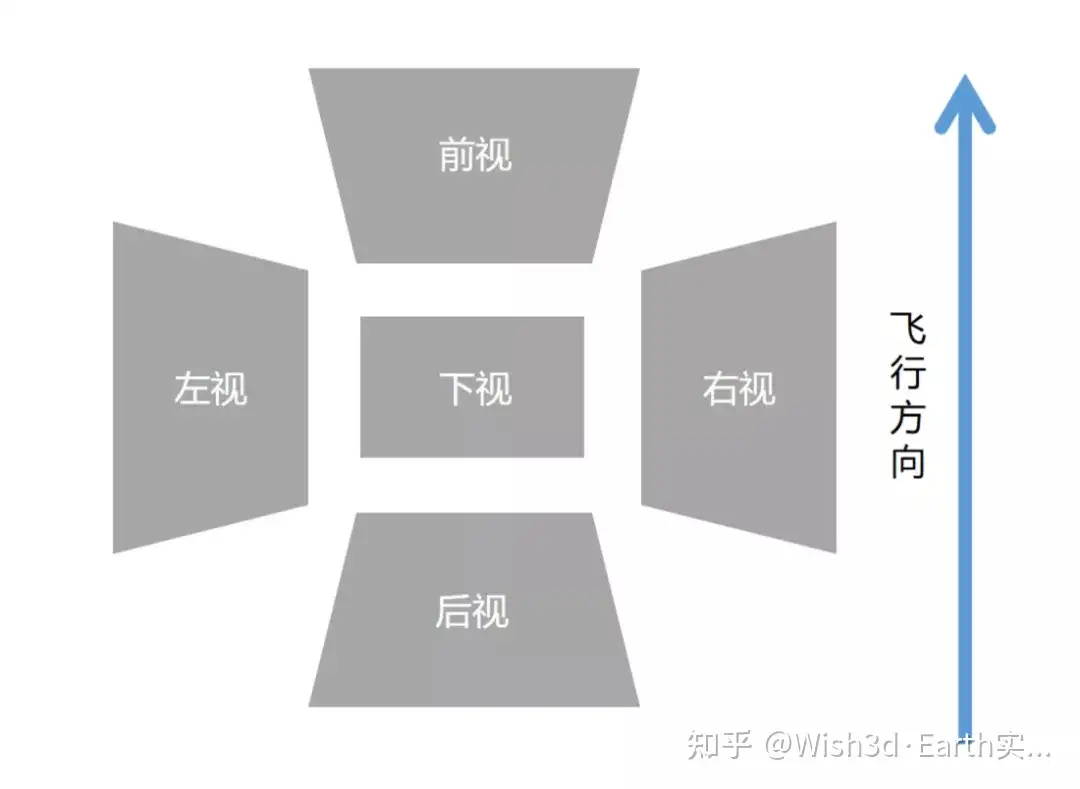
倾斜航摄仪集成一个下视相机和多个倾斜相机,现行业内最主流的倾斜相机为五镜头相机,以赛尔无人机的五镜头倾斜摄影相机为例:由中央一个垂直对地观测,获取垂直影像,于该相机4个正交方位分别以一定的倾角放置一个相机。
由于倾斜航摄仪拍摄模式的特殊性,相机间的相对关系对于地物覆盖范围、倾斜影像分辨率变化范围、相邻曝光点影像重叠度、集成系统空间尺寸乃至后续数据处理算法都会产生影响,因此确定相机间排布模式是首要解决的问题之一。针对多种排布可能,通过对地物覆盖范围、倾斜影像分辨率等因素进行计算与仿真,确定较优的排布模式为下视影像长边跨航线、前视、后视影像长边跨航线、左视、右视影像短边跨航线。
相机倾角指倾斜放置相机主光轴与垂直放置相机主光轴在它们所确定的平面内所形成的夹角。根据经验及模拟测试,以五镜头倾斜相机赛尔 102S为例当倾角在40°~50°之间时,所获得的影像更接近人眼对立面纹理信息的真实视觉体验,此范围角度一般为摄影测量大倾角范围。
相机安装倾角、视场角与分辨率的关系
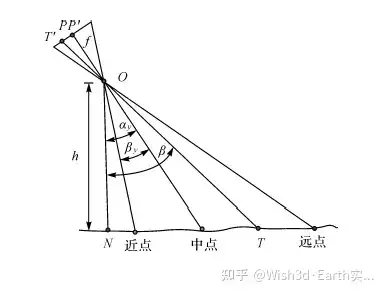
垂直和倾斜影像的地面分辨率是倾斜航摄仪最为直观与重要的参数之一,也是直接决定后续三维建模质量的关键因素。倾斜影像自动空三时,为了保证量测点的精度,应尽量保证不同影像的分辨率一致,从而侧视影像需要裁掉远端和近端分辨率差异过大的部分,但同时为了保证影像的重叠度,航线设计时需要顾及侧视影像的分辨率。因此需对垂直与倾斜视角的影像分辨率进行组合分析。根据垂直影像GSD计算公式GSD=δ*h/f结合倾斜相机主光轴旋转角度,由以下公式可以得出倾斜影像中心点、近地点与远地点的大致分辨率。设倾斜影像中心点、近点和远点分辨率分别为GSDmid、GSDtop、GSDbotton,计算公式如下:
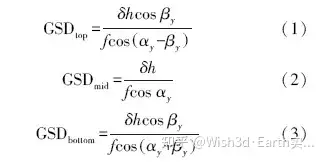
式中,δ为传感器单像元大小;h为飞行高度;f为相机焦距;αy为倾角;βy=arctan (b/f) 为视场角的一半。倾斜影像的几何关系如图所示。
除飞行高度、焦距、像素大小之外,倾角也是影响倾斜影像GSD的一个重要因素。倾角越小,其远点的分辨率越高,近点、远点GSD差异也就越小,GSD指标的控制也是影响倾角设计的一个关键因素。通常,获取的倾斜影像与垂直影像中心点地面分辨率应相当,倾斜影像的最小分辨率不宜超过垂直影像分辨率的3倍。
倾斜航摄相机的选择
相机选择是影像获取的关键因素之一,决定了所获取影像质量的好坏 (如影像分辨率、成像的几何精度等) 和摄影交会角的大小 (与相机视场角和摄影方式有关),将直接影响最终的量测精度。如何搭配下视相机与倾斜相机的焦距,是影像获取的另一个关键因素。目前,以赛尔无人机的倾斜相机为例,赛尔102S镜头焦距为正射25mm/倾斜35mm,赛尔202S镜头焦距为正射40mm/倾斜56mm,并且倾角都设置为45°。焦距较长的相机,视场角小,可以获取更多的影像纹理;焦距较短的相机,视场角大,影像变形也越厉害。选择组合相机焦距时,需要整体考虑下视相机焦距和侧视相机焦距的组合选择。
所以赛尔202S作为航测旗舰,更适合大面积、高楼、复杂场景的高效航测。当倾角设置为45°时,一般情况下侧视相机的焦距宜为下视相机焦距的1.4倍。因此,倾斜摄影时一般选用侧视相机的焦距比下视相机的焦距要长。
重叠度保障
航拍的时候如何保证重叠度呢?重叠度应该是多少呢?根据不同的航拍用户,重叠度也不一样,如果只是为了快拼影像,一般旁向重叠度60%以上,航线(纵向)重叠度70%以上,如果用于三维重建,建议旁向重叠度70%以上,航线(纵向)重叠度80%以上,上述数值为赛尔无人机实验积累经验值可作参考。如何保证重叠度呢?
很多的飞控软件都实现了自动化,只需要输入相机参数,飞行高度,重叠度就可以自动规划出航线。那这些航线是如何来的?如何自己设计航线该如何保证重叠度达到了要求?
这里其实是初中所学的【小孔成像原理】,假设相机以长边飞行方向垂直,航线间距为x。和示意图如下:
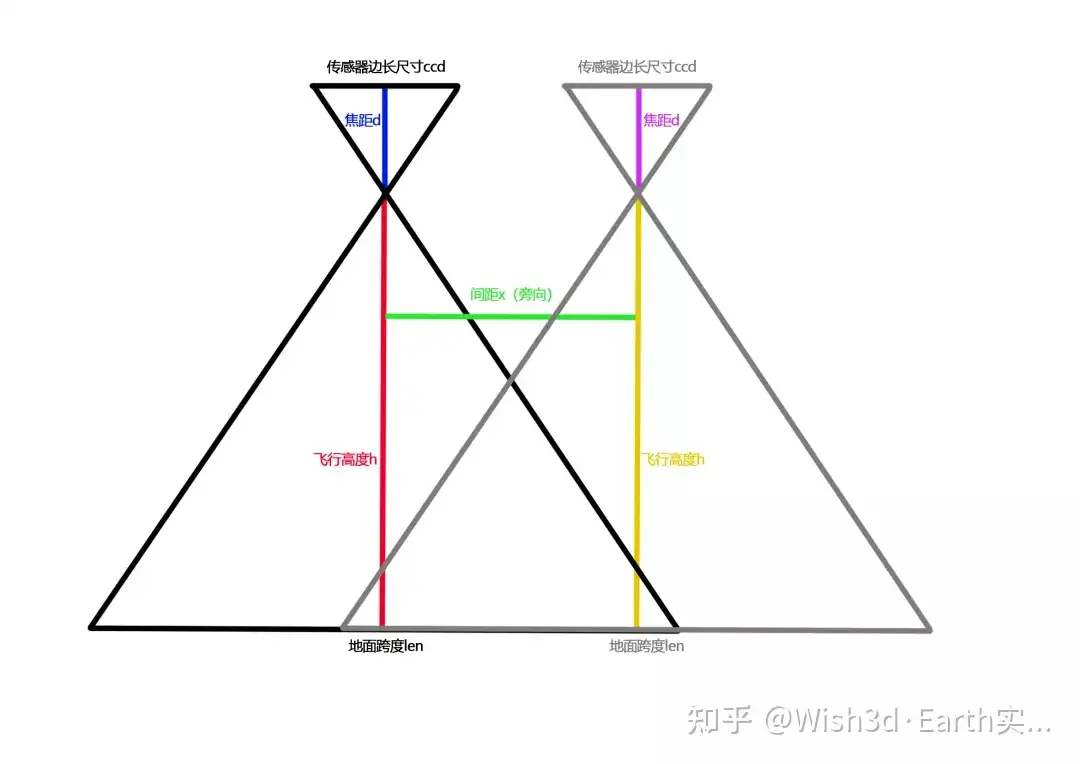
小孔成像-航线间距按照上述条件,这里计算旁向重叠度用的是传感器长边尺寸d/ccd = h/len旁向重叠率 = ( len - x )/ lenx=(1-旁向重叠度)*h/d*ccd沿着飞行方向也是一样的,只不过要用传感器的短边尺寸。
以赛尔 102S系列相机为例,焦距 d = 25 mm(取下视)飞行高度 h = 96 m(设置分辨率为1.5cm)传感器长边尺寸 ccd = 23.5 mm 由d / ccd = h / len 有单片覆盖宽度len = h * ccd / d = 90 m 如果间距 x(旁向)= 27 m , 那么旁向重叠率 = ( len - x )/ len = 70%模型精度计算
上述所有的计算都是依据指定的飞行高度来计算的,飞行高度如何确定呢?这就和模型精度挂钩了,需要什么样精度的模型,使用了什么相机决定了飞行的最合适高度。
首先是照片分辨率的确定。拍的照片是多少分辨率的?还是小孔成像原理,传感器长边尺寸ccd,对应拍出的照片的长边像素数wx像素d/ccd = h/len,拍照分辨率(m/像素)=ccd/d*h/w公式:倾斜摄影模型精度=同工程正射分辨率的三倍倾斜摄影当中,经常会说我的模型是几厘米精度的,我飞的数据是5cm精度的模型,这个5cm是如何衡量的呢?
倾斜摄影的模型精度一般是照片分辨率的三倍,就是根据照片生成的正射影像的地面分辨率的三倍,如果生成的正射影像的分辨率是2cm/像素,那模型精度基本就是5-10cm。公式:倾斜摄影模型精度=同工程正射分辨率的三倍
02 如何提升成果精度
像控点的布设
像控点的布设的好坏对后期成图起着相当关键的作用,首先,每个架次的至少需要4个像控点,并同时布设总像控点数目10%-20%的检查点。若遇到地形起伏变化较大,数目植被复杂地区需加密像控点,若不加密或者分布不均匀覆盖飞行区域时,会导致翘曲、导致平差数据不能达到精度要求。
像控点分布正确方式
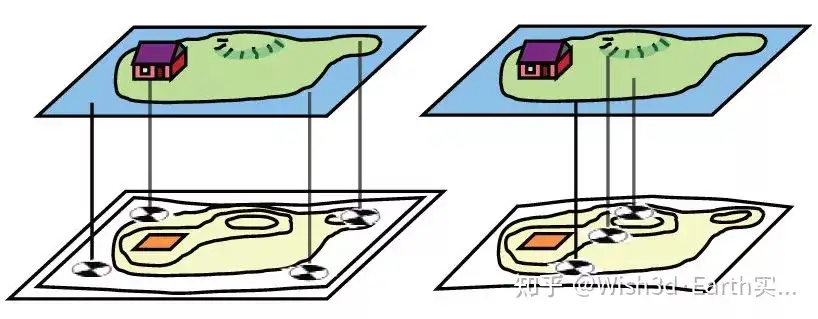
像控点分布错误情况
赛尔无人机的航测相机已全面实现免像控,外业航测无需打任何像控点基本可达到1:500的航测精度。
图像质量
影响图像质量的因素分为天气因素与相机本身因素。天气因素主要是风、雾霾,当风速过大时,应该考虑停止飞行。首先,风大会造成飞机飞行速度和姿态变化过大,导致从空中所照的照片扭曲程度过大,最终成像模糊。同时会加速飞机动能的消耗,导致缩短飞行时间,最终有可能会在有限的时间内未能完成计划区域。
相机本身因素主要是对相机的像素和曝光时间的,像素主要相机本身决定,曝光时间的选取和天气有着密切的关系,当光线条件不好的时候,应该尽量增加曝光时间,将快门速度调大,以赛尔PSDK 102S+大疆 M300 RTK为例,阴天时建议节快门数度为1/800,晴天时建议调节快门数度为1/1000,建议选择ISO 数值100到400的照片进行数据处理。

ISO 值为100

ISO 值为1000
重叠度
重叠率是提高相片连接点的重要保障,但是有些时候为了压缩飞行时间或扩大飞行区域,会调低重叠率。重叠率若低,每个地物点仅会在少量航片中显现,在提取连接点的量会很少,相片的连接点少自然会导致飞机的照片连接粗糙,最终导致提取的连接点平差结构弱,提升重叠率则可避免上述问题。

低重合率
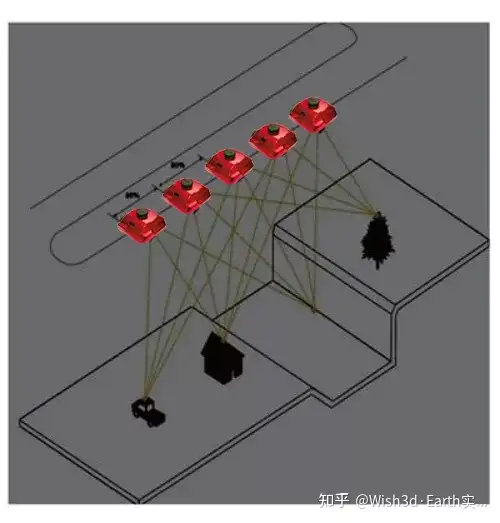
高重合率
飞行高度
飞行高度主要影响的是飞行航片中的GSD(每个像素的实际大小),飞行高度的变化必然会影响航片相幅的大小,以大疆M300 RTK+赛尔102S为例,飞行高度与GSD的关系值通过数据可以得出,飞机离地面越近,GSD 数值越小,则精度越高。从中也发现,地面起伏变化大的地区选取合适的飞行高度对提高精度也是相当重要的。

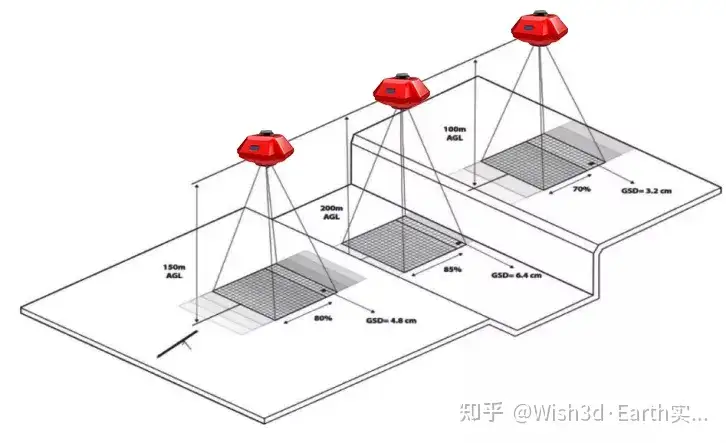
航高对GSD 的影像
更多关于关于航高、分辨率、重叠度的设置数据计算,可打开“赛尔工具箱”点击航拍参数计算,或进入赛尔无人机微信公众号打开“赛尔航测计算助手”小程序即可自动计算相应结果。

赛尔工具箱软件
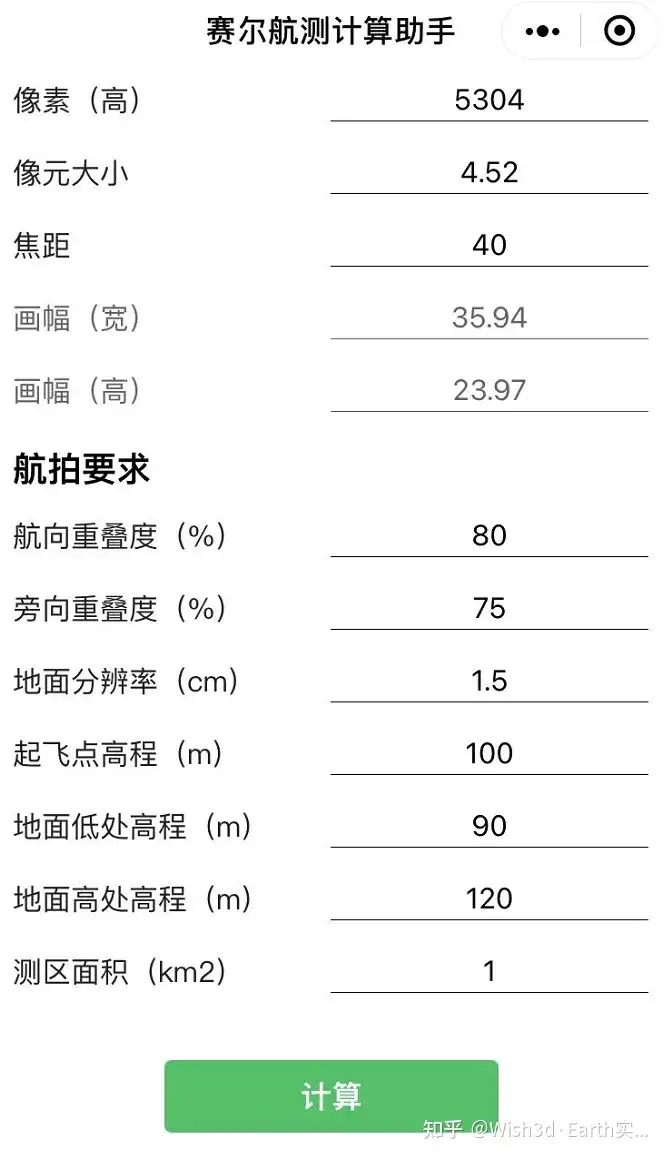
赛尔航测计算助手
03 检查倾斜摄影质量成果
精度检查
模型精度即为倾斜影像数据的测量值与真实值之间的差值:检测实景三维模型的精度要利用GPS RTK在测区外业实地测量若干个特征点,并记录WGS84坐标、椭球高及需要拍摄的每个点对应的实地位置。将从实景三维模型中提取每个检查点对应位置的模型坐标与检查点的测量坐标作对比进行精度评估。这是严格计算倾斜影像模型精度的方法。按照上述方法来评定倾斜影像的模型精度:倾斜摄影的模型高程精度大致是地面分辨率(GSD)的三倍,如果生成的正射影像的分辨率是5cm,那模型的高程精度约为15cm,更大 限差为2倍中误差即30cm。
影像重叠度检查
由于倾斜航空影像采取多视匹配的算法进行空三加密处理,要求影像重叠度大才能匹配更多的同名点。一般情况下,倾斜摄影时下视相机的影像设计航向重叠度应不小于70%,但航向重叠度也不宜过大,如果重叠过大,一方面会造成摄影基线变得更短,不仅影响测图精度也会降低效率,另一方面基线变短会增加影像旋偏角超限的可能,一般在70%~80%之间为宜。
影像倾斜角检查
依据机载POS数据检查下视相机的倾斜角度。在摄影期间飞机的飞行姿态发生了倾斜,相机轴与铅直方向的夹角。当a=0时为垂直摄影,是最理想的情形。但飞机受气流影响,不能完全置平,赛尔 PSDK 102S V2 给予相机8°的角度补偿,让相机在航测过程中基本保证垂直向下。
影像旋偏角检查
倾斜航空影像由于重叠度大,基线短,飞机姿态稍有变化即可能导致旋偏角超限。像片旋偏角是由于摄影时航摄机定向不准确而产生的。旋偏角不但会影响像片的重叠度,而且还给航测内业作业增加难度。因此,对像片的旋偏角,一般要求小于6°,个别更大 不应大于8°,而且不能连续三片有超过6°的情况。
摄区、分区覆盖保证检查
倾斜摄影为了保证摄区外侧也能获取影像,摄区边界覆盖较垂直摄影大。实际航摄过程中,一般可在航线旁向和航向方向测区边界范围外增加一个航高以上距离的外扩。

在数据预处理中,您可打开赛尔航测管家在拷贝设置中选择不拷贝地面照片,或是导入kml文件剔除拍摄测区外的照片,只拷贝建模所需数据,减少数据处理运算量。
航线弯曲度与航高保持检查
摄区航线弯曲度可依照框幅式数字航空摄影规范执行,航线弯曲度一般不大于1%,当航线长度小于5000 m时,航线弯曲度更大 不大于3%。由于倾斜航空摄影的航高一般小于1000 m,因此在航高保持方面要求同一航线上相邻相片的航高差不大于30 m,更大 航高与最小航高之差不大于50 m,分区内实际航高与设计航高之差不大于50 m。
影像质量检查
影像质量检查与传统垂直摄影的要求一致,除云、云影、烟、雾、反光等检查项外,还需检查影像像点位移,确保在曝光瞬间造成的像点位移不大于1个像素。

